1.3.5 Другие вспомогательные устройства.
В сварочных робототехнических комплексах в качестве вспомогательного оборудования используются поворотные столы (рис. 1.19). Пока робот сваривает одно изделие, оператор устанавливает на другой стороне стола новое изделие для сварки, которое подается ему на движущемся транспорте. Такой способ ручной установки в дальнейшем может быть заменен автоматизированной системой, связывающей рабочие позиции с транспортными устройствами, которые подают и убирают изделия из зоны сварки.
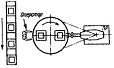
Рис. 1.19 - Схема сварочного комплекса с поворотным столом
Некоторые объекты специфического вспомогательного оборудования требуется устраивать при роботизации сборочных операций. Здесь применяются механизмы подачи, накопители, направляющие, установочные приспособления и различные специальные устройства для операций крепежа, пайки, склейки и др. Наконец, к вспомогательному оборудованию относятся и различные средства техники безопасности на роботизированных технологических комплексах. Чаще всего применяется сеточное ограждение.
Применяются также системы защиты с фотоэлементами.
Механизм автоматической смены захватного устройства ПР.
В полностью автоматических (безлюдных) ГПС при смене объекта производства возникает необходимость в смене захватного устройства (ЗУ) при сохранении модели ПР.
Схема байонетного механизма автоматической смены ЗУ представлена на рис. 1.20.
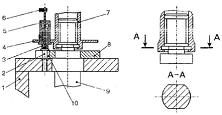
Рис. 1.20. Байонетный механизм автоматической смены ЗУ
ЗУ, предназначенные для автоматической смены, помещаются в магазинное устройство, которое может быть выполнено в виде неподвижной стойке или поворотного диска с соответствующими гнёздами 1. Каждое ЗУ опирается на торцевую поверхность стойки фланца 8 и центрируется цилиндрическим пояском 9 по гнезду, имеющему форму отверстия с вырезом для прохода верхней части корпуса захвата. Угловое положение ЗУ определяется штифтом 2. Угловая фиксация ЗУ в руке робота 7 осуществляется фиксатором, который представляет собой подпружиненную скалку 4 с роликом 3. Он закрепляется во втулке 5, помещенной на руке робота 7. От поворота скалка удерживается винтом и связана также с рукояткой 6 для расфиксации ЗУ. На рисунке показана установка ЗУ в гнездо 1 магазина перед раскрытием байонетного замка (схема соответствует взятию ЗУ из магазина). Поскольку штифт 2 магазина входит в тот же паз 10 фланца 8, что и ролик фиксатора 3, то в момент установки ЗУ в магазин штифт 2 отжимает фиксатор 4, обеспечивая тем самым поворот руки робота 7 с фиксатором на угол 90°, что необходимо для раскрытия байонетного замка. При повороте руки 7 на угол 90° ролик отжатого фиксатора катится по поверхности фланца 8. После поворота на угол 90° рука уходит вверх, оставляя ЗУ в гнезде магазина 1.
При взятии ЗУ из магазина рука, перемещаясь вертикально, надевается на его хвостик, фиксатор отжимается. При повороте руки на 90° байонетный замок замыкается.